<blockquote id="2xu1c"></blockquote>
玉林西門子S7-200代理商潯之漫智控技術有限公司 上海詩慕自動化設備有限公司本公司銷售西門子自動化產品,*,質量保證,價格優勢西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜我公司大量現貨供應,價格優勢,*,德國*
更新時間:2025-06-14
廠商性質: 總代理商
在線留言
玉林西門子S7-200代理商 玉林西門子S7-200代理商
潯之漫智控技術有限公司 上海詩慕自動化設備有限公司
本公司銷售西門子自動化產品,*,質量保證,價格優勢
西門子PLC,西門子觸摸屏,西門子數控系統,西門子軟啟動,西門子以太網
西門子電機,西門子變頻器,西門子直流調速器,西門子電線電纜
我公司大量現貨供應,價格優勢,*,德國*
采購西門子產品,均可質保一年、假一罰十、以滿足客戶的需求為宗旨 、 以誠為本、精益求精 |
6se70 伺服控制器(MC)集成了定位功能,要實現定位控制可以有三種方法:直接設定位置控制器,基本定位功能(自由功能塊),F01定位功能。
1 基本定位功能概述
基本定位功能是MC伺服控制器在自由功能塊中固化的功能,可以免費使用,實現運動控制系統中的一些簡單定位功能,如:homing ,position ,setup 功能。可以選擇旋轉軸和線性軸,設定定位限位開關等功能,能滿足大部分定位應用的要求。
功能圖在說明書的789a,789b,789c 部分,如圖1所示。
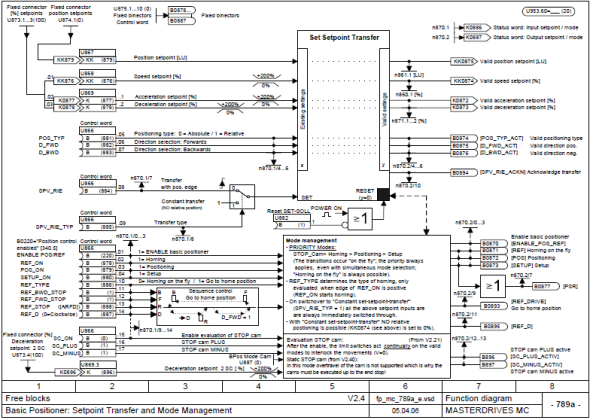
圖1
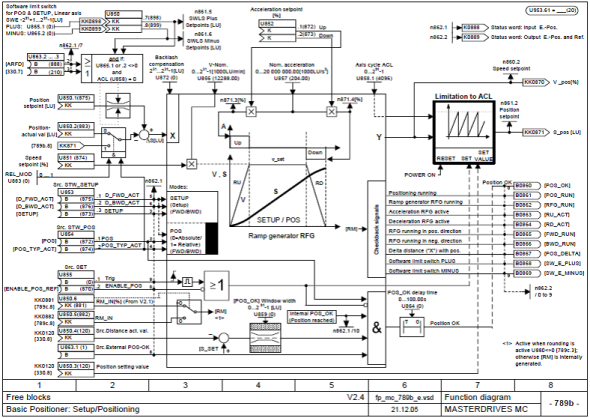
圖2
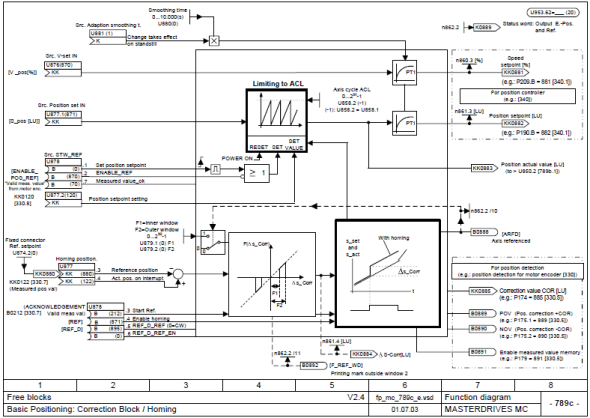
圖3
2 啟用基本定位功能
首先設置MC 裝置的參數,使裝置能在速度閉環模式驅動運行(參見調試手冊P060=3或P060=5的調試步驟 ),然后設定參數激活基本定位功能,流程如下:
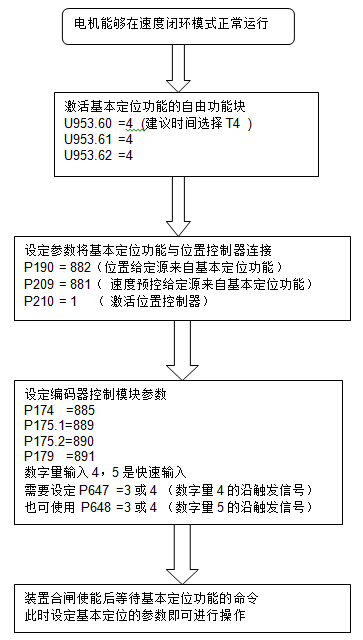
西門子伺服驅動器代理商
圖4
3 基本定位功能的參數設定
U856 ---速度的標稱值,即100%轉速對應的 LU, 通常設定為額定轉速,單位1000LU/min
例如 電機額定轉速3000rpm , 編碼器脈沖4096/rev,則U856=4096*3000/1000=12288
U857---加速度標稱值
U858---旋轉軸線性軸選擇
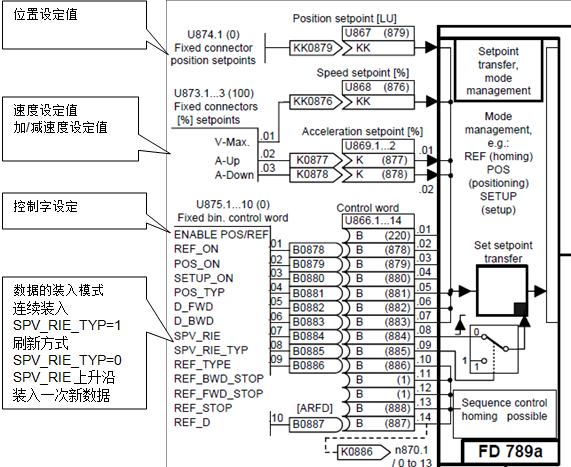
圖5
裝置合閘使能后,進入o011 狀態,等待速度,此時對控制字進行設定可以實現工作模式。首先ENABLE POS/REF,基本定位功能使能激活(B0220連接量使能),然后可以進行各種工作模式的操作。
3.1 Homing mode (回零模式)
Homing mode (回零點) 包含兩種方式Homing on the fly模式和Homing movement模式。
3.1.1 Homing on the fly模式
? Homing 模式使能REF_ON =1 ;
? 模式選擇REF_TYPE=0 ;
? 通過數字量輸入4或5來觸發動作,也可與SETUP或 POSITION模式一同使用。
3.1.2 Homing movement 模式
? 模式選擇REF_TYPE=1 ;
? 選擇開關動作有效時的運行方向,REF_D=0 正向運行過程中,開關動作有效
REF_D=1 反向向運行過程中,開關動作有效
? 設定啟動時的運行方向,正向D_FWD=1或反向B_FWD=1
? 為正向限位D_FWD_STOP 和反向限位B_FWD_STOP分配兩個數字量開關,高電平表示到達限位
? Homing 模式使能REF_ON 上升沿激活動作,開始運行 ;
工作時序如下(圖6):
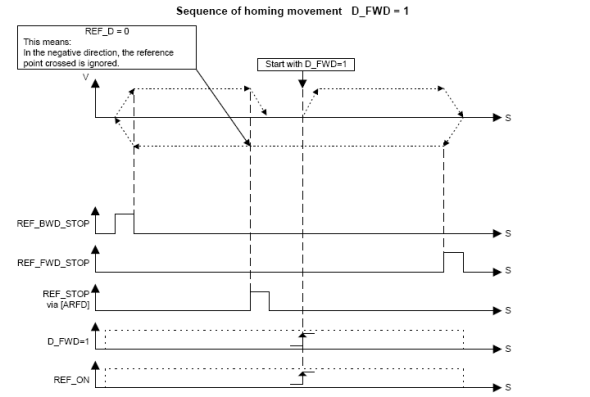
圖6
3.2 Set up mode (速度模式)
? 使能SETUP_ON=1
? 設定運行方向D_FWD或B_FWD上升沿觸發運行動作
? 運行速度設定U868
? 也可以在設定好方向后SETUP_ON上升沿觸發動作
工作時序如下(圖7)
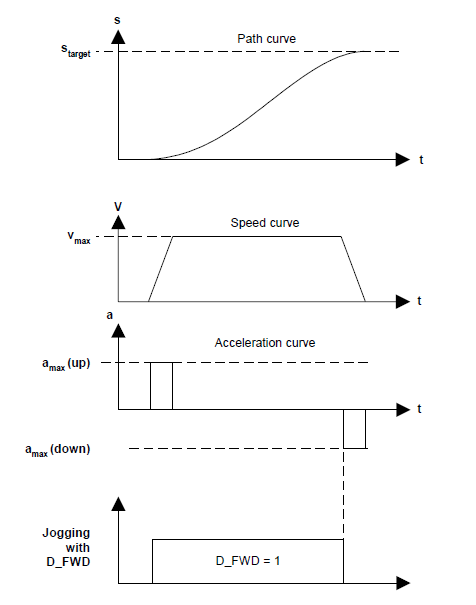
圖7
3.3 Position mode (定位模式)
Position 模式包含兩種定位方式,對定位方式和相對定位方式。
3.3.1 Absolute position (對定位方式)
? 使能POS_ON=1
? 使能POS_TYP=0
? D_FWD=1正向運行到設定位置
B_FWD=1 反向運行到設定位置
D_FWD=0,B_FWD=0短路徑運行到設定位置
? 位置設定U867,速度U868
3.3.2 Relative position (相對定位方式)
1.1 電子齒輪比的作用
電子齒輪比就是對伺服接收到的上位機脈沖頻率進行放大或者縮小。其中一個參數為分子,為電機編碼器的分辨率;一個為分母,為電機旋轉一圈所需要的脈沖數。如果分子大于分母就是放大,如果分子小于分母就是縮小。
在 實際應用中,連接不同的機械結構,移動小單位量所需的電機轉動量是不同的,例如:同樣一個伺服電機,如果連接了一個螺距為10mm的絲杠,那么電機轉一 圈機械移動10mm,每移動0.001mm就需要電機轉1/10000圈;而如果連接螺距為5mm的絲杠,每移動0.001mm需要電機轉1/5000 圈。而電機編碼器的分辨率是相同的,因此可以通過設置電子齒輪比來使電機脈沖數和機械小移動量相匹配,這就是電子齒輪比的作用。 1.2 相關概念介紹
(1)編碼器分辨率:伺服電機軸旋轉編碼器反饋脈沖數。
V90的伺服電機有增量編碼器和對值編碼器,其分辨率如下圖:
圖01. V90伺服電機編碼器的分辨率
(2)每轉脈沖數:絲杠轉動一圈所需脈沖數。
(3)小長度單位(LU):上位機發出一個脈沖時,絲杠移動的直線距離或旋轉軸轉動的度數,也是控制系統所能控制的小距離。這個值越小,經各種補償后越容易得到更高的加工精度和表面質量。當進給速度滿足要求的情況下,可以設定較小的長度單位。也稱作“脈沖當量”。
